Partial and Approximate Symmetry Detection for 3D Geometry¶
对称性
本文的对称指的是在旋转、镜像、缩放变换下的不变性。 本文的目标也是通过算法提取局部的对称性,允许近似、部分缺损的情况。
文章算法分为两个步骤。
在第一个步骤中,算法在形状表面计算一组点集上的形状描述子,通过这个descriptor,可以将点与点进行配对。这些配对会在表面形成一个"质量分布"(高密度区域),用于描述局部表面的一个特征。
在第二个步骤中,算法通过对"质量分布"进行聚类,以确定对称区域。
最后,算法得到一个"对称图"结构。
算法核心¶
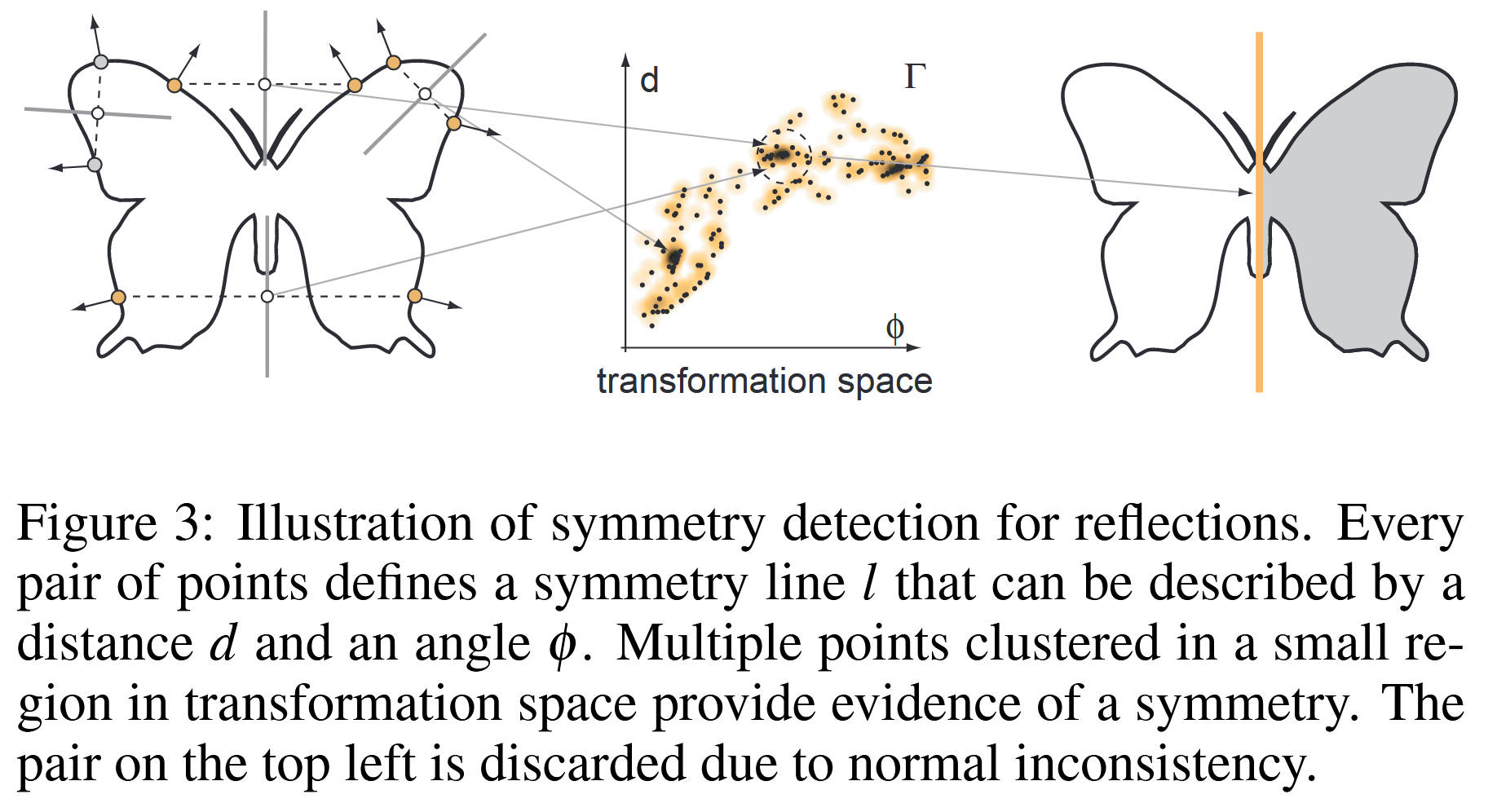
以二维情况为例,对于figure 3中的二维蝴蝶形状,其边界上任意点\((\mathbb{p},\mathbb{q})\),都可以通过其角平分线\((\mathbb{p}+\mathbb{q})/2\)来定义一个反射的关系,这条角平分线的法向为\(\mathbb{p}-\mathbb{q}\)。这样的平分线就是一个evidence。通过观察所有的点对,就能积累这些evidence并提取相关的对称性。
对称性提取的主要流程¶
- 表面点采样,得到点集\(P\)
- 为\(P\)的每个点\(p_i\in P\)计算一个本地签名(local signature)
- 如果\(p_i,p_j\)的签名相似,则将它们结对,并计算一个变换空间\(\Gamma\),\(\Gamma\)可以将\(p_i\)映射到\(p_j\)
- 在变换空间\(\Gamma\)下聚类,得到\(P\)的一个子集。这个子集在特定变换下保持不变性。
本地签名
描述点周围局部几何特征的一组数值。具体来说,通常是一个特征向量,例如:曲率、法向量、邻域等。
变换空间
指所有可能的变换的集合。对于点对\(p_i,p_j\),算法计算变换\(\tau\),使得\(\Tau (p_i)=p_j\)。这个变换就是变换空间\(\Gamma\)下的一个点。
签名(Signature)¶
签名实际上就是给定一组点,确定能够让这组点保持不变性的一组变换。这些变换包括平移、旋转、反射、放缩等。 虽然两个点能够确定反射变换,但两个点提供的自由度无法确定其他类型的变换。
算法转而为每个顶点计算一个"几何签名",利用normal cycle的概念,通过[Alliez at al. 2003]的方法来近似在每个点\(\mathbf{p}_i\)上计算曲率张量。
算法在以\(\mathbf{p}_i\)为中心,\(r\)为半径的球体内计算曲率张量,计算积分主曲率\(\kappa_{i,1}\)和\(\kappa_{i,2}\)以及对应的主方向\(\mathbf{c}_{i,1}\)和\(\mathbf{c}_{i,2}\).
半径\(r\)的选取很重要。\(r\)应该和采样间距相当,这样可以在计算曲率张量时实现充分的平均化,避免对采样点具体位置的强依赖性。
如何计算变换\(\mathbf{T}_{ij}\)?¶
- 根据主曲率,定义一个局部坐标系\((\mathbf{c}_{i,1}, \mathbf{c}_{i,2}, \mathbf{n}_i)\)
- 根据\(\mathbf{n}_i,\mathbf{n}_j\)的共同平面确定变换\(\mathbf{T}_{i,j}\)的旋转\(\mathbf{R}_{ij}\)
- 根据主曲率确定放缩量\(s_{ij}=(\kappa_{i,1}/\kappa_{j,1}+\kappa_{i,2}/\kappa_{j,2})/2\)
- 已知旋转和放缩以及点\(i,j\)的位置,可轻易得到平移量
- 于是,给定两个点\(\mathbf{p}_i,\mathbf{p}_j\),可以得到一个7维的变换空间\(\Gamma=\mathbf{T}_{ij}=(s_{ij}, R^x_{ij}, R^y_{ij}, R^z_{ij}, t^x_{ij}, t^y_{ij}, t^z_{ij})\), 这里\(R^x_{ij}, R^y_{ij}, R^z_{ij}\)是根据\(\mathbf{R}_{ij}\)分解得到的欧拉角。
Point Pruning(点修剪)¶
- 只保留主曲率比较明显的点,要求两个主曲率比值足够大